RobotToMaskImage¶
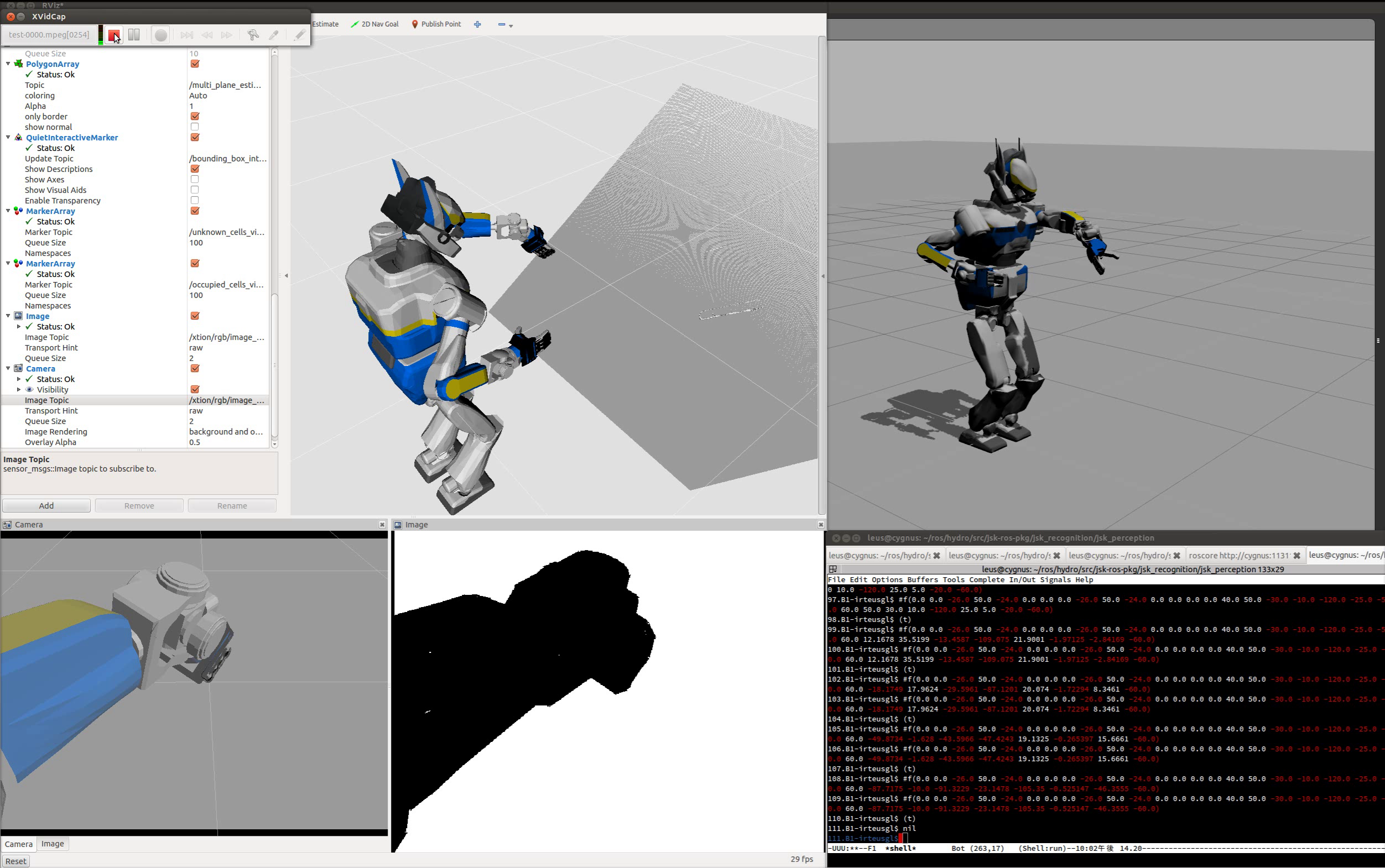
Convert robot model into mask image.
Subscribing Topic¶
~input/camera_info(sensor_msgs/CameraInfo)Input camera info to project 3-D polygon.
Publishing Topic¶
~output(sensor_msgs/Image)Mask image to fill
~inputpolygon.The size of the output image will be resized to fit the
roiandbinnning.~output/info(sensor_msgs/CameraInfo)CameraInfofor the output image.
Parameters¶
~max_robot_dist(Double, default:10)Maximum distance of robot from camera.
Distance is in z-axis direction of the camera coordinates.
robot_description(String, required)robot_description of the mask-generated robot.
~self_see_default_padding(Double, default:0.001)Same as the parameter in pr2_navigation_self_filter. Padding of robot link for mask generation.
~self_see_default_scale(Double, default:1.0)Same as the parameter in pr2_navigation_self_filter. Scale of robot link for mask generation.
~self_see_links(Array of link configuration, required)Same as the parameter in pr2_navigation_self_filter. Configuration of links for mask generation. Link configuratin consists of name (required), padding (optional), and scale (optional).
Samples¶
roslaunch jsk_perception sample_robot_to_mask_image.launch