RGBDecomposer¶
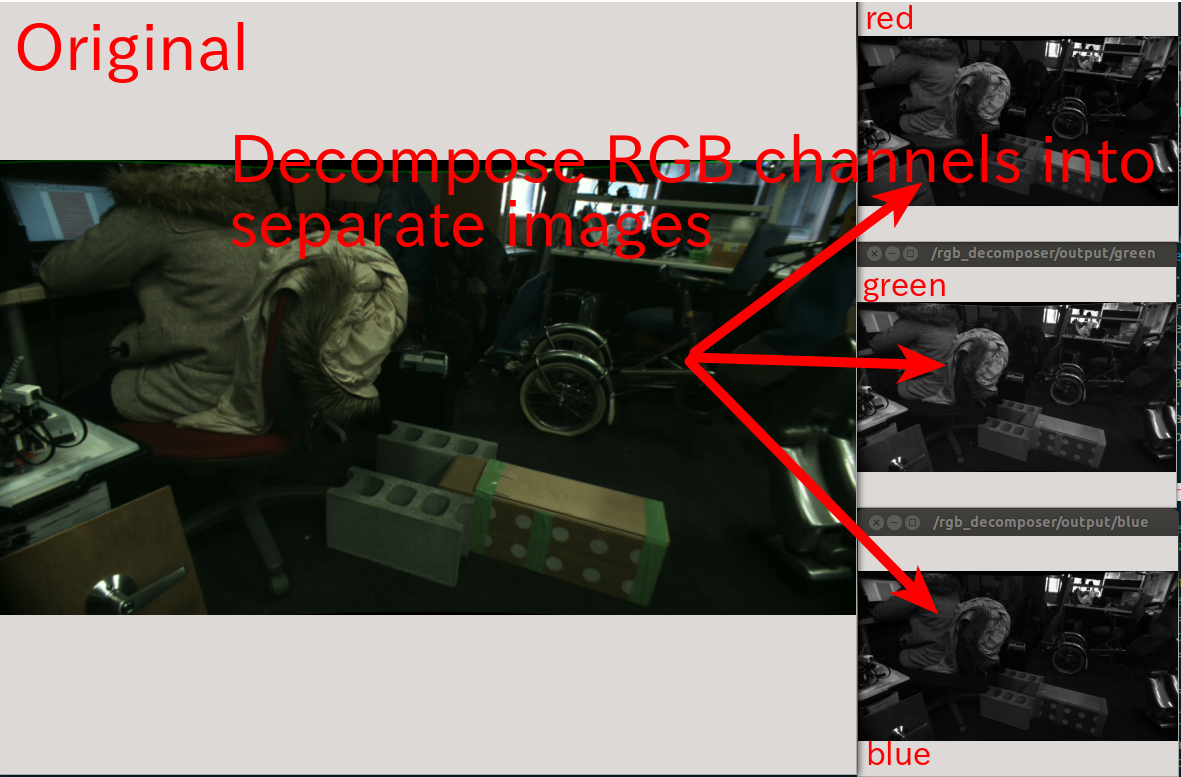
Split the original color image into 3 greyscale image of each color(RGB) strength.
Subscribing Topic¶
~input(sensor_msgs/Image)Divide input camera image into 3 image (R,G,B) according to its color info.
Publishing Topic¶
~output/red(sensor_msgs/Image)~output/green(sensor_msgs/Image)~output/blue(sensor_msgs/Image)
Parameters¶
none
Samples¶
roslaunch jsk_perception sample_rgb_decomposer.launch