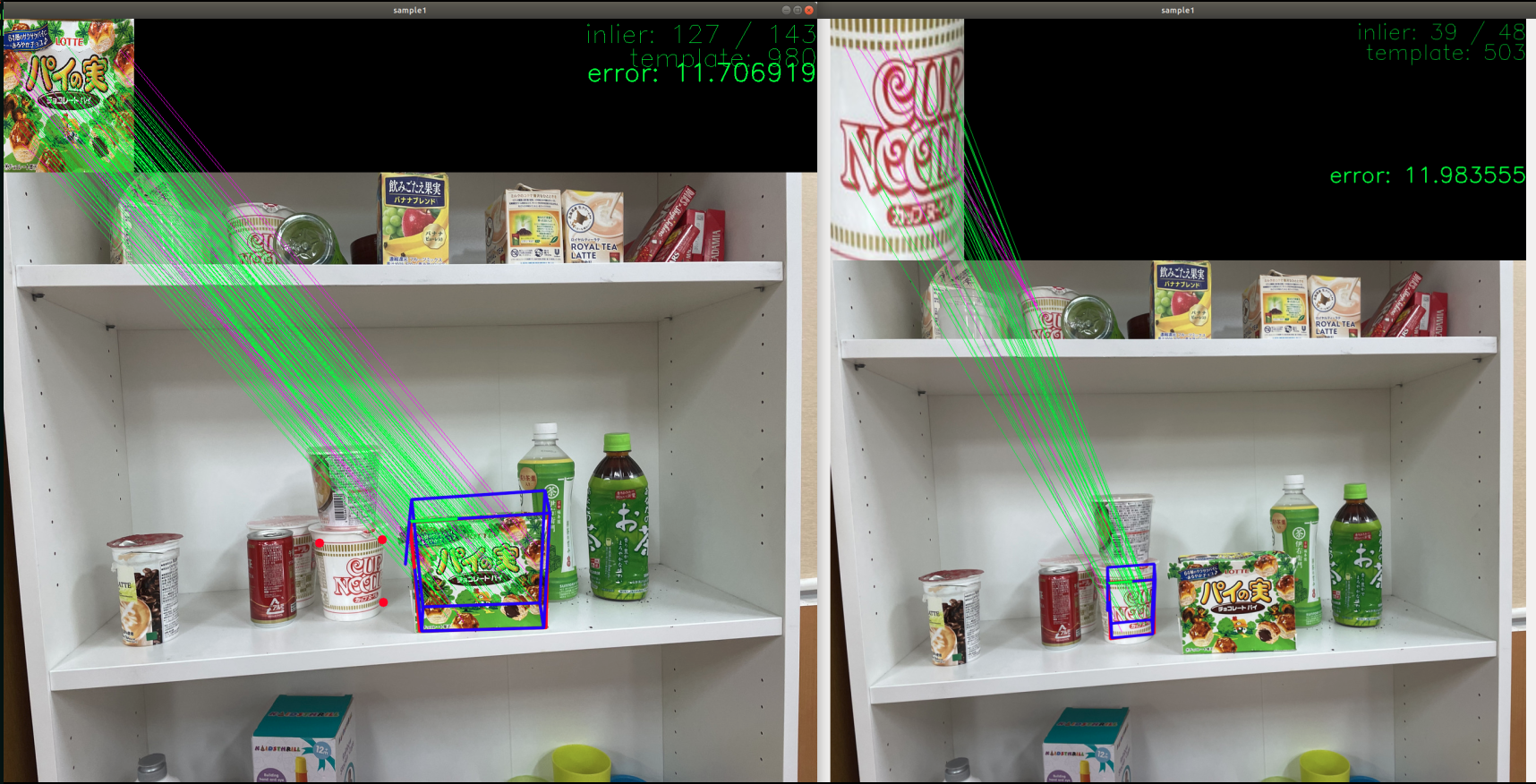
PointPoseExtractor¶
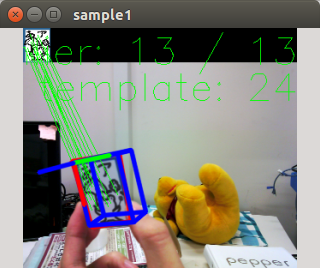
Calcute object pose compared to template.
Subscribing Topic¶
/ImageFeature0D(posedetection_msgs::ImageFeature0D)Image, camera and template feature information. You can use ImageShift to get it.
Publishing Topics¶
/ObjectDetection(posedetection_msgs::ObjectDetection)Detected object pose with time stamp.
/ObjectDetection_agg(posedetection_msgs::ObjectDetection)Detected object pose with time stamp.
/object_pose(geometry_msgs::PoseStamped)Detected Object Pose.
~debug_image(cv_bridge::CvImage)Output image for debug.
/tf(tf2_msgs/TFMessage)Detected Object Frame when
~publish_tfis set to true.
Parameters¶
~template_filename(str default:"/sample/opencv-logo2.png")path to template image
~object_width(float default:0.06)Width of template image
~object_height(float default:0.0739)Height of template image
~relative_pose(str default:"0 0 0 0 0 0 1")Coordinate of the object relative to the texture
~reprojection_threshold(float default:3.0)~distanceratio_threshold(float default:0.49)~error_threshold(float default:50.0)~theta_step(float default:5.0)~phi_step(float default:5.0)~viewer_window(bool default:true)~window_name(str default:"sample1")~autosize(bool default:false)The window size is automatically adjusted to fit the displayed image, and you cannot change the window size manually.
~publish_null_object_detection(bool default:false)~publish_tf(bool defaut:false)If set to true, detected object pose is also broadcasted as tf frame.
~child_frame_id(string default:"matching")frame_id of detected object when
~publish_tfis set to true.
Service¶
/SetTemplate(SetTemplate)Used to add another template.
Mouse Event¶
Set template from viewer window.
To specify the range of template, left-click four corners clockwise from upper left. Selected points are reset by right-clicking.
After all four points are selected, you can input template’s width, height and filename. The filename should have an extention.
Sample¶
sample_point_pose_extractor.launch
roslaunch jsk_perception sample_point_pose_extractor.launch
rostopic echo /ObjectDetection
Example of how to run set_template service¶
client.call is available only after the node receives ImageFeature0D.
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import cv2
import cv_bridge
import rospy
from jsk_perception.srv import SetTemplate, SetTemplateRequest
rospy.init_node('point_pose_extractor_sample')
client = rospy.ServiceProxy('SetTemplate', SetTemplate)
rospy.sleep(1)
req= SetTemplateRequest()
im = cv2.imread('../../sample/ros_diamondback.jpg')
bridge = cv_bridge.CvBridge()
imgmsg = bridge.cv2_to_imgmsg(im, encoding='bgr8')
imgmsg.header.frame_id = 'dummy_camera'
imgmsg.header.stamp = rospy.Time.now()
req.type = 'img0001'
req.image = imgmsg
req.dimx = 0.1
req.dimy = 0.05
req.savefilename = 'img0001.png'
res = client.call(req)
print(res)