RegionGrowingSegmentation¶
What Is This¶
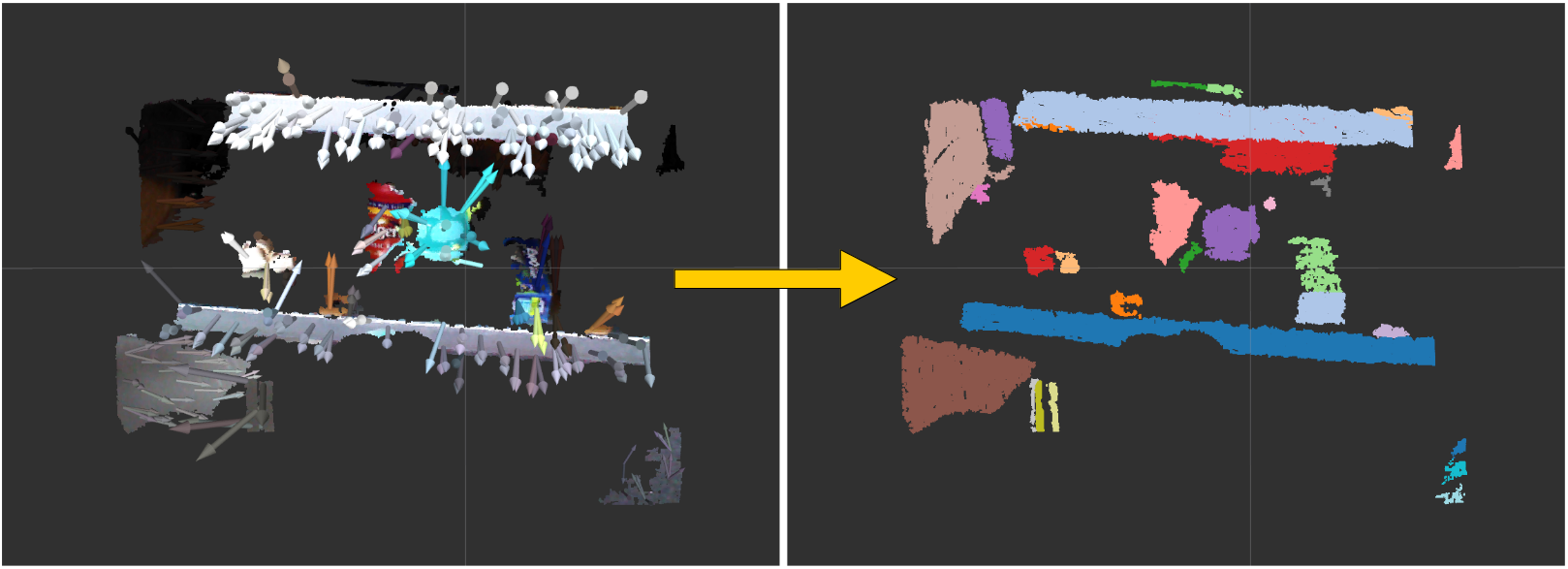
This node segment point cloud by using pcl::RegionGrowing.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Point cloud to be segmented.
It should have
xyzandnormalfield and should not haveNaNpoints.
Publishing Topic¶
~output(jsk_recognition_msgs/ClusterPointIndices)Result of clustering.
Parameter¶
~number_of_neighbors(Int, default:10)Number of the neighbors used in KdTree search.
~min_size(Int, default:20)Minimum number of points that a cluster needs to contain in order to be considered valid.
~max_size(Int, default:25000)Maximum number of points that a cluster needs to contain in order to be considered valid.
~smoothness_threshold(Float, default:pi / 2)Threshold value for the angle between normals in radians.
~curvature_threshold(Float, default:0.1)Threshold value for curvature testing.
Sample¶
roslaunch jsk_pcl_ros sample_region_growing_segmentation.launch