HSIColorFilter¶
Filter pointcloud based on HSI range.
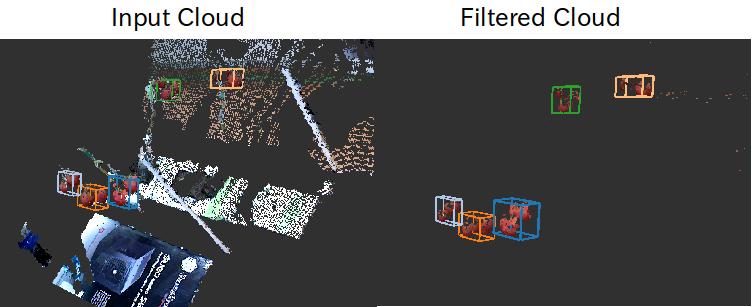
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. rgb field is required.
~indices(pcl_msgs/PointIndices)Indices of pointcloud. only available if
~use_indicesis true.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Filtered pointcloud.
~color_space(sensor_msgs/PointCloud2)Color space visualization for debugging
Parameters¶
~h_limit_max(Integer, default:127)~h_limit_min(Integer, default:-128)~s_limit_max(Integer, default:255)~s_limit_min(Integer, default:0)~i_limit_max(Integer, default:255)~i_limit_min(Integer, default:0)Color range to filter.